
Laws Of Motion
Aristotle’s Fallacy
An external force is required to keep a body in motion.
Newton’s First Law of Motion
Everybody continues to be in its state of rest or of uniform motion unless compelled by an external force.
Or
If the net external force on a body is zero, its acceleration is zero.
Linear momentum is the product of mass and velocity.
⇒ \(\overrightarrow{\mathrm{p}}=\mathrm{m} \overrightarrow{\mathrm{v}}\)
Newton’s Second Law of Motion
The rate of change of linear momentum of a body is directly proportional to the applied force and takes place in the direction of the applied force.
i.e, \(\overrightarrow{\mathrm{F}} \propto \frac{\mathrm{d} \overrightarrow{\mathrm{p}}}{\mathrm{dt}}\)
⇒ \(\overrightarrow{\mathrm{F}}=\mathrm{k} \frac{\mathrm{d} \overrightarrow{\mathrm{p}}}{\mathrm{dt}}\)
In SI, k = 1
∴ \(\overrightarrow{\mathrm{F}}=\frac{\mathrm{d} \overrightarrow{\mathrm{p}}}{\mathrm{dt}}=\frac{\mathrm{d}}{\mathrm{dt}} \mathrm{m} \overrightarrow{\mathrm{v}}\)
Read And Learn More: NEET Physics Notes
For a body of fixed mass,
⇒ \(\overrightarrow{\mathrm{F}}=\mathrm{m} \frac{\mathrm{d} \overrightarrow{\mathrm{v}}}{\mathrm{dt}}\)
⇒ \(\overrightarrow{\mathrm{F}}\)= m\(\overrightarrow{\mathrm{a}}\)
⇒ ∵ \(\frac{\mathrm{d} \overrightarrow{\mathrm{v}}}{\mathrm{dt}}=\overrightarrow{\mathrm{a}}\)
SI unit of force is Newton (N).
1 newton(1 N) is that force which produces an acceleration of 1ms-2 in a body of mass 1kg.

Laws of Motion NEET Important Questions with Solutions
Note:
In the equation \(\overrightarrow{\mathrm{F}}\) = \(m \vec{a}\) we see that, if \(\overrightarrow{\mathrm{F}}\) = 0, then \(\overrightarrow{\mathrm{a}}\) = 0,
Newton’s 1st law is a special case of Newton’s 2nd law:
Impulse = Force x time duration
Impulse = change in momentum
Impulse= Pf – Pi= mv – mu (where Pf is the final momentum and Pi is the initial momentum)
Impulse= m(v – u)
Impulse= m(at)
(∴ v = u + at)
Impulse = Ft
Newton’s Third Law
To every action, there is an equal and opposite reaction.
Note:
1. Forces always occur in pairs. Force on a body A by B is equal and opposite to the force on the body B by A.
2. Action and reaction forces act on different bodies, not on the same body According to Newton’s third law
⇒ \(\overrightarrow{\mathrm{F}}_{\mathrm{AB}}=-\overrightarrow{\mathrm{F}}_{\mathrm{BA}}\)
Where, \(\overrightarrow{\mathrm{F}}_{\mathrm{AB}}\) is the force on A by B and \(\overrightarrow{\mathrm{F}}_{\mathrm{BA}}\) is the force on B by A.
According to law of conservation of momentum,
“The total momentum of an isolated system of interacting particles is conserved.”
A particle is said to be in equilibrium if net external force on a body is zero.
Static friction is directly proportional to normal reaction.
fs α N
Best Notes for Laws of Motion NEET Preparation
The maximum value of static friction is given by,
(fs )max = μs N
It is also known as limiting friction.
Where μs is called the coefficient of kinetic friction.
Kinetic friction is given by,
(fk) = μk N
Where μk called the coefficient of static friction.
The maximum permissible speed of a car rounding on a horizontal circular road is,
⇒ \(\mathrm{v}_{\max }=\sqrt{\mu_{\mathrm{s}} \mathrm{rg}}\)
Maximum permissible speed of a car rounding on a banked road is given by
⇒ \(\mathrm{v}_{\max }=\left[\mathrm{Rg} \frac{\mu_{\mathrm{s}}+\tan \theta}{1-\mu_{\mathrm{s}} \tan \theta}\right]^{\frac{1}{2}}\)
If μs = 0 (in the absence of friction)
vo = \((\mathrm{Rg} \tan \theta)^{\frac{1}{2}}\)
At this optimum speed frictional force is not required to provide centripetal force. If the car moves in this speed wear and tear of the tyres will be less.
Acceleration of a block on a smooth inclined plane:
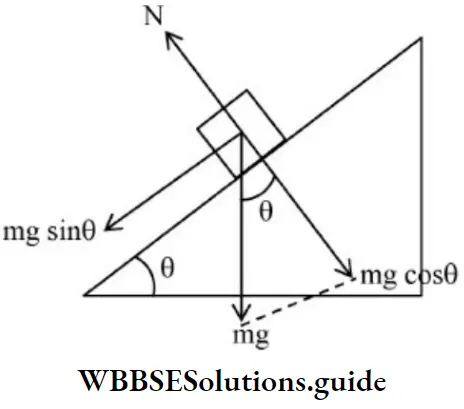
Normal reaction is given by,
N = mg cos θ
The force responsible for the acceleration of the block is mg sin θ.
i.e F = ma = mg sin θ
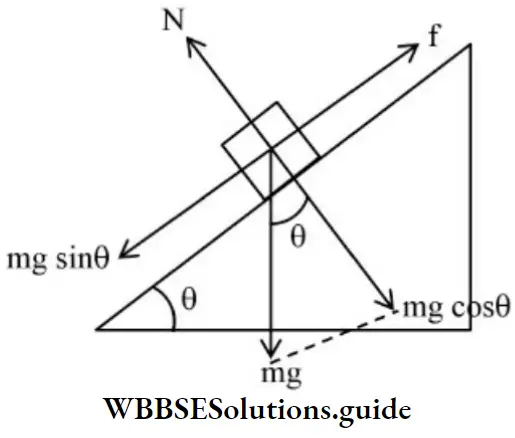
Acceleration of a block down a rough inclined plane
Tricks to Solve Laws of Motion Problems for NEET
The force responsible for the acceleration of the block is,
ma =mg sin θ —f
ma = mg sin θ – μs N
mg = mg sin θ – μsmg cos θ
∴ a = g[sin θ — μ cos θ ]
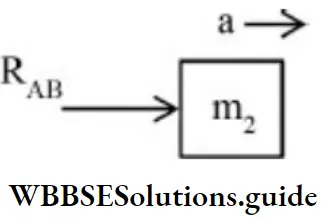
The motion of blocks in contact
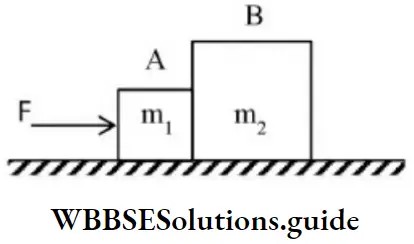
Due to the applied force F the system moves with an acceleration a FBD of A
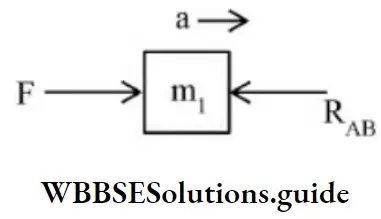
Where RAB is the reaction force between A & B
(F- RAB) = m1a ________________ (1)
FBD of B
Newton’s Laws of Motion NEET MCQs with Answers
RAB = m2 a ________________(2)
Substituting in (1) we get
F – m2a = m1 a
F= (m1+m2)a
a= \(\frac{F}{m_1+m_2}\)
(2) ⇒ RAB = \(=\frac{\mathrm{m}_2 \mathrm{~F}}{\mathrm{~m}_1+\mathrm{m}_2}\)
If Three masses m1 , m2 and m3 are in contact
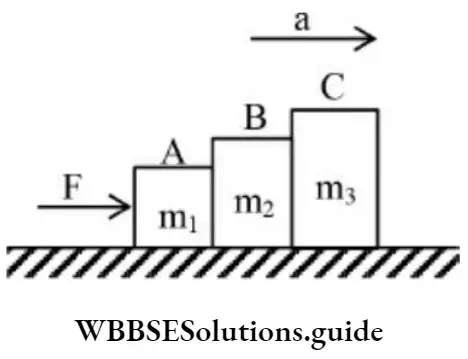
a= \(\frac{\mathrm{F}}{\mathrm{m}_1+\mathrm{m}_2+\mathrm{m}_3}\)
RAB \(=\frac{\left(\mathrm{m}_2+\mathrm{m}_3\right) \mathrm{F}}{\mathrm{m}_1+\mathrm{m}_2+\mathrm{m}_3}\)
RBC = \(\frac{m_3 F}{m_1+m_2+m_3}\)
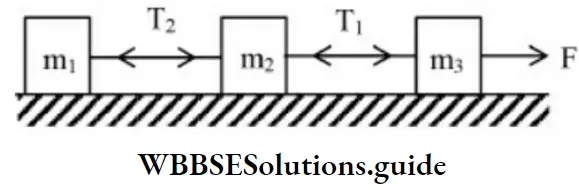
Motion of blocks connected by massless strings:
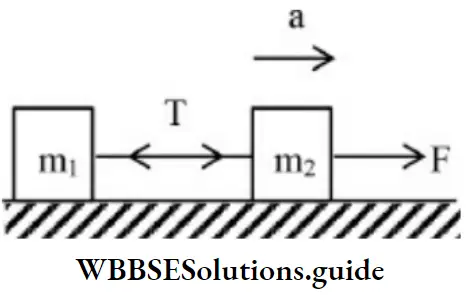
a= \(\frac{F}{m_1+m_2+m_3}\)
NCERT Summary of Laws of Motion for NEET Physics
⇒ \(\mathrm{a}=\frac{\mathrm{F}}{\mathrm{m}_1+\mathrm{m}_2+\mathrm{m}_2}\)
T1 = (m1+m2)
T2 = m1a
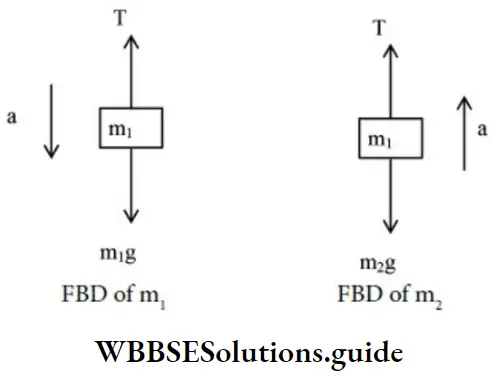
Motion of connected blocks over a pulley:
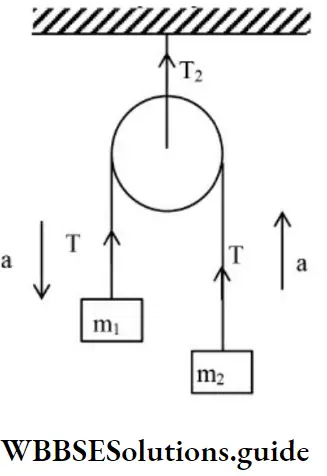
m1 >m2
Say m1 >m2
Step-by-Step Solutions for Laws of Motion NEET Problems
(1)+(2) ⇒
m1g – m2g = (m1 +m2)a
⇒ \(\mathrm{a}=\frac{\left(\mathrm{m}_1-\mathrm{m}_2\right) \mathrm{g}}{\mathrm{m}_1+\mathrm{m}_2}\)
Substituting the value of an in (2) we get
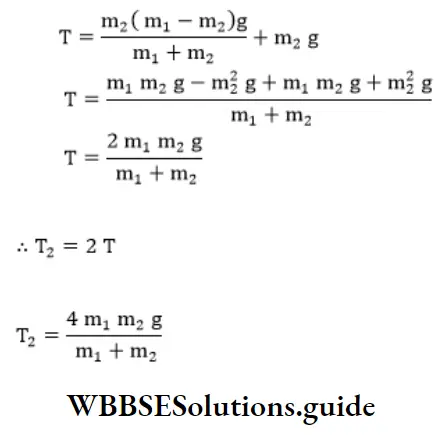
Real-Life Applications of Newton’s Laws for NEET
Note: Angle of repose is defined as the angle of the inclined plane with horizontal such that a body placed on it just begins to slide.
μ = tan θ
Where θ is the angle of repose.