Mechanical Properties Of Fluids
Pressure, \(P=\frac{F}{A}\)
SI unit of pressure is Nm-2 or Pascal
One atmospheric pressure, 1 atm = l.Olx 105 Pa= 760toir
The atmospheric pressure is maximum at the surface of earth and goes on decreasing as we move up into earth’s atmosphere.
If P0 is the atmospheric pressure then for a point at depth h below the surface of a liquid of density P, the hydrostatic pressure is given by,
P = P0+hρg
The pressure difference between hydrostatic pressure P and atmospheric pressure P0 is called guage pressure.
Read And Learn More: NEET Physics Notes
P – P0+hρg
Density, ρ = \(\frac{\text { mass }}{\text { volume }}=\frac{M}{V}\)
Relative density = specific gravity =\(\frac{\text { density of body }}{\text { density of water }}\)
Note
- The relative density of water is 1
- The relative density of mercury is 13.6
Pascal’s Law
According to Pascal’s law, if the gravity effect is neglected, the pressure at every point of liquid in the equilibrium of rest is the same.
This means, the increase in pressure at one point of the enclosed liquid in equilibrium of rest is transmitted equally to all other points of the liquid and also to the walls of the container, provided the effect of gravity is neglected.

NEET Physics Fluids Chapter Notes with Important Formulas
Hydraulic Lift
The working of hydraulic lift is based on pascal’s law.
It is used to lift heavy objects.
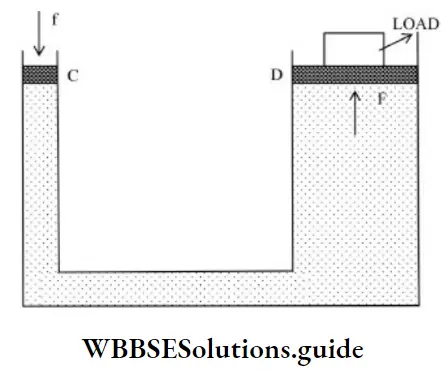
The pressure exerted on piston ‘C’ is given by
⇒ \(P=\frac{f}{a}\)
This pressure will be transmitted everywhere and even to piston D. Hence, force acting on piston D is given by,
⇒ \(F=P A=\frac{f}{a} A=f\left(\frac{A}{a}\right)\)
Since, A >> a, therefore, F >> f. Hence heavy objects placed on the larger piston are easily lifted upwards by applying a small force.
Best Short Notes for Mechanical Properties of Fluids NEET
Archimedes Principle
When a body is immersed party or wholly in a fluid, at rest, it is buoyed up with a force equal to the weight of the fluid displaced by the body.
Apparent weight of the body of density (ρ) when immersed in a liquid of density (σ) is given by
Apparent weight = Actual weight – Up thrust
⇒ \(W-F_{u p}\)
⇒ \(V \rho g-V \sigma g\)
⇒ \(W_{a p p}=V \rho g\left(1-\frac{\sigma}{\rho}\right)\)
If density of body is greater than that of liquid (ρ>σ), then weight will be more than up¬thrust so the body will sink.
If density of body is equal to that of liquid (ρ = σ), then weight will be equal to up-thrust so the body will float fully submerged.
If density of body is lesser than that of liquid (ρ <σ), then weight will be less than up-thrust so the body will, move upwards and in equilibrium will float and partially immersed, such that,
⇒ \(W_{a v p}=V_{i m} \sigma g\)
where Wapp is the apparent weight of the body and Vin is the volume of the body immersed in the liquid.
The velocity of liquid up to which its flow is streamline and above which it becomes turbulent is called critical velocity.
Reynold’s number determines the nature of flow of liquid
If NR <1000 the flow of liquid is streamline or laminar.
If 1000 < NR < 2000 the flow is unsteady.
If NR > 2000 the flow is turbulent.
According to the equation of continuity,
av = constant
where a is area of cross section of pipe and v is velocity of fluid.
Bernoulli’s Theorem
For an incompressible non-viscous fluid flowing through a pipe, the sum of pressure energy, potential energy and kinetic energy per unit volume is a constant.
⇒ \(P+\rho g h+\frac{1}{2} \rho v^2\)= constant
Velocity of efflux is given by
⇒ \(v=\sqrt{2 g h}\)
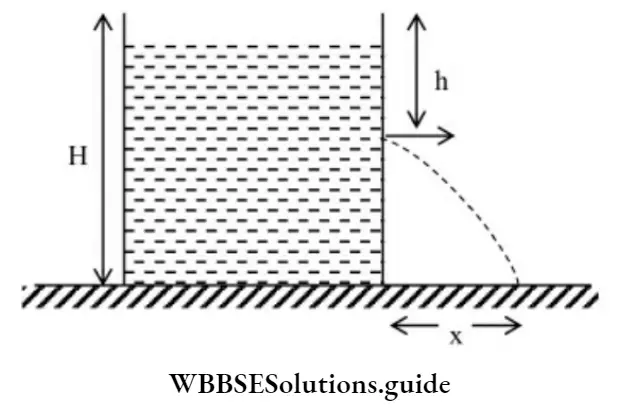
Mechanical Properties of Fluids NEET Important Questions
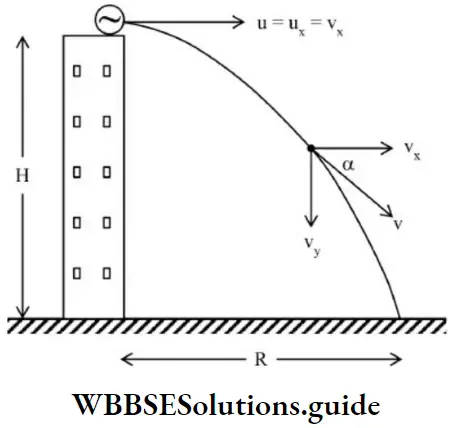
Where, h is the depth of the hole below the free surface of the liquid. The time required for the fluid to reach the ground is,
⇒ \(t=\sqrt{\frac{2(H-h)}{g}}\)
Range,
⇒ \(x=v_x t=\sqrt{2 g h} \sqrt{\frac{2(H-h)}{g}}\)
⇒ \(x=2 \sqrt{h(H-h)}\)
x is maximum when, \(\)
Maximum range is given by,
⇒ \(x=2 \sqrt{\frac{H}{2}\left(H-\frac{H}{2}\right)} \Rightarrow x_{\max }=H\)
Viscous force is given by
⇒ \(F=-\eta A \frac{d v}{d x}\)
If A = 1 and, \(\frac{d v}{d x}=1, \text { then } F=\eta\)
Where η is called co-efficient of viscosity.
Stoke’s law: According to this viscous force acting on a spherical object falling in a fluid medium is directly proportional to its velocity.
ie., \(F_{\text {viscows }} \propto v\)
or \(F=6 \pi \eta n v\)
Where, r is radius of the sphere, η is coefficient of viscosity.
The maximum velocity with which a spherical body moves in a viscous fluid when it is dropped is called terminal velocity.
Terminal velocity is given by,
⇒ \(v_t=\frac{2}{9} \frac{r^2(\rho-\sigma) g}{\eta}\)
where, ρ is the density of sphere and η is the density of fluid.
Bernoulli’s Theorem and Applications NEET Notes
Note
If ρ>σ, then, vt is positive, sphere moves down
If ρ=σ, then vt = 0
If ρ<σ, then sphere moves upwards ( vt is negative)
Example: Air bubbles in water.
The force of attraction between molecules of same substance is called cohesive force.
The force of attraction between molecules of different substance is called adhesive force.
Surface tension: It is the property of the liquid due to which free surface of the liquid behaves like elastic stretched membrane.
Small liquid drops assume spherical shape due to surface tension.
Surface tension, T=\(\frac{f}{l}\)
Work done in blowing a liquid drop is,
W = T × inci ease in area
W =\(T \times 4 \pi\left[r_2^2-r_1^2\right] \Rightarrow W=4 \pi T\left[r_2^2-r_1^2\right]\)
Mechanical Properties of Fluids Previous Year Questions NEET
Work done in blowing a soap bubble is,
⇒ \(W=2\left[4 \pi T\left(r_2^2-r_1^2\right)\right]\)
(since the bubble has two free surfaces)
⇒ \(\Rightarrow W=8 \pi T\left[r_2^2-r_1^2\right]\)
Expression for capillary rise:
⇒ \(h=\frac{2 T \cos \theta}{r \rho g}\)
Where θ is the angle of contact, r is the radius of the capillary, p is the density of liquid and T is surface tension.
Excess pressure inside a drop is given by \(\Delta P=\frac{2 T}{r}\)
Excess pressure inside a soap bubble is given by, =\(\Delta P=\frac{4 T}{r}\)